筋肉を動かしたときに発生する電気信号を活用したコントローラーの紹介。
まずセンサー(電極)をつけた腕(筋肉)を動かし、検出したアナログの電気信号を増幅し、デジタル信号に変換*1する。そのあと、デジタル信号を解析して、機械やコンピューターを動かす。
動画の事例では、筋電コントローラーを使って二足歩行ロボットを操作(前進、後退、開脚)している。
まるで「身体そのものがコントローラーになっている」感覚。
*1 動画では、アナログ信号を増幅して絶対値を取り、積分したあと、デジタル信号に変換している。

写真1
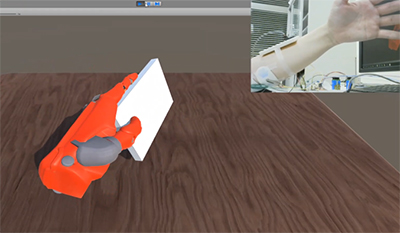
写真2
1.腕にセンサー(電極)をつける
2.筋肉を動かす
3.検出したアナログ信号を増幅してデジタル信号に変換する
4.コンピューターでその信号を解析して特徴を見つける
5.見つけた特徴を、機械を動かすコマンド、あるいはコンピューターを操作する命令に翻訳(変換)する
6.機械やコンピューターを動かす
(a)義手・義足の操作
→筋肉の電気信号で動く義手は実用化が進んでいる
(a)以外に、大学や企業で次のような研究も行われている
(b)自分の腕の動きでロボットを操作
(c)筋肉の動きだけでゲームをプレイ
(d)その他の事例:【仮想空間におけるVRハンドの操作*2】
(i)まず、筋肉を動かしたときに出る電気信号のパターンを多く集めて、AIに「この力の入れ方はどんな握り方か」を覚えさせる
(ii)AIが学習したあと、白い物体の大きさや形に合わせて、筋肉の力の入れ方を変えると、AIがその電気信号のパターンを読み取って、
「これはボールをつかむときの力の入れ方!」
「これは板状のものをつかむときの力の入れ方!」
と判断し、白い物体をつかむ
・VRハンドを操作して、それぞれの白い物体を適切につかめていることがわかる(写真1、2)
*2 この実験では、VRハンドの移動に、6軸センサを使用している。
※このページに含まれる情報は、掲載時点のものになります。