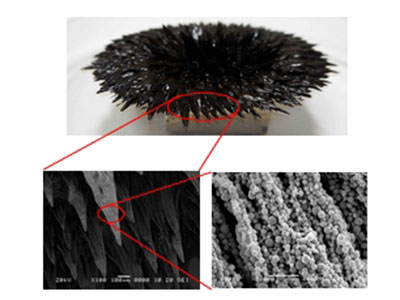
研究室で用いている軸方向繊維強化型人工筋肉(上)とMcKibben型人工筋肉(下)
研究室で用いている軸方向繊維強化型人工筋肉(上)とMcKibben型人工筋肉(下)
人とロボットが近くなった現代、身の回りではさまざまな形でロボットが活躍しています。そのような状況で大切なのは「安全である」ことです。ロボットにとって人間社会は複雑であり、予測できない人や物の動きに対処することは難しい課題です。そのためロボットと周囲の接触時に安全性を確保することは重要であり、柔軟な材料(=ソフトマテリアル)の採用は解決策の一つです。わたしたちはソフトマテリアルを用いたアクチュエータ(=ソフトアクチュエータ)として空気圧ゴム人工筋肉について研究しています。

軸方向繊維強化型人工筋肉を用いた拮抗筋関節構造のロボットアーム

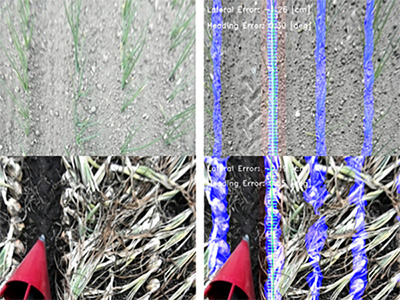
McKibben型人工筋肉を用いた農業用パワーアシストスーツ
山形大学戸森研究室ではソフトマテリアルを用いたアクチュエータの開発とロボティクスへの応用を進めています。開発している「空気圧ゴム人工筋肉」はゴムと繊維材料で構成され、圧縮空気の注入により強い収縮力(数百~千Nレベル)を発揮します。さらに、軽量(数十グラム)、柔軟であり防水性や静音性にも優れています。一方で空気圧応答や材料の変形に起因する制御の難しさがあり、本研究室では理論モデルに基づいた制御手法の提案や、人工筋肉の改良をおこなっています。
また応用開発では、対象と安全に接触できるロボットアームや、防水性を活かした農業用アシストスーツを開発しています。人工筋肉の柔軟性は安全面での効果だけでなく、周辺環境とのコンタクトにおいても有効な特性として働きます。複雑で未知な周辺環境や不整地においては通常多くのセンサと計算によってロボットを動かすことになります。一方で人工筋肉の場合は自身の柔軟性がそれらの不定要素をある程度吸収でき、センシング面や計算面において比較的低コストに対応できます。さらにアシストスーツでは人工筋肉を装着者の体表面に沿って配置するという、柔軟性を最大限に活かした新構造も開発できました。この構造により従来アシストスーツにない服のような扱いと着用感を実現しています。これからも開発ではユーザーの声を設計に反映できるよう調査し、必要とされる技術を社会に提供していきます。
※このページに含まれる情報は、掲載時点のものになります。