「ロボットというと、硬い、力強い、正確で高速に動作する、といったことが連想されるのではないでしょうか。従来のロボット技術だけでは解決が難しい課題に対し、やわらかい材料を利用したり、いきもののようなしなやかな動きを実現する、「いいかげんさ」・「あいまいさ」を特徴とするロボット技術である「ソフトロボティクス」が注目されています。私たちの研究室では、ソフトロボティクスの要素技術である知能材料を用いたアクチュエータ・センサの作製技術、上手く動かすための制御の技術と理論の研究に取り組んでいます。
動画1 釣糸人工筋肉の動作例
動画2 イオン導電性高分子金属接合体を用いたソフトグリッパへの応用検討例

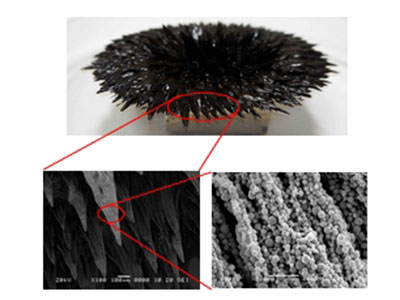
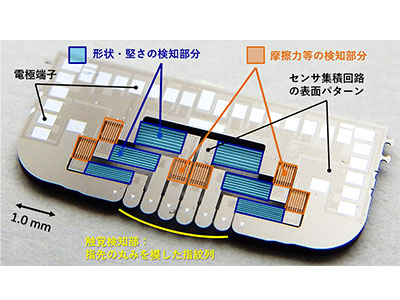
図1 微細加工技術・印刷技術を用いたイオン導電性高分子金属接合体の作製例
ソフトロボティクスは、やわらかさやしなやかさを構造や材料を用いて、様々な目的を達成、課題を解決しています。多くの研究、提案が行われており、やわらかい材質でできたグリッパ、硬さや形状が変化するハンド、ヘビや魚といった生き物を模したトロボットなど、ソフトロボットの研究開発が進んでいます。また、、ヒトと共に作業を行うロボット、ヒトが装着して動きをアシストするウェアラブルロボット、アシストスーツなどへの展開も期待されています。
ソフトロボティクスの要素技術として、機能性高分子材料を用いたソフトアクチュエータ(人工筋肉)やセンサの研究開発があり、電気、温度、光などに応答する知能材料の利用が進められています。私たちは、誘電エラストマー(Dielectric Elastomer: DE)、釣糸人工筋肉、イオン導電性金属接合体(Ionic polymer-metal composite: IPMC)を用いた研究開発を進めています。
DEは、柔軟な電極で挟まれた薄いゴム膜でできています。電極に電圧を印加することで変形するアクチュエータとして用いることができます。ソフトアクチュエータの中でも応答速度が速く、変形量が大きいことから、柔軟な歩行機構やロボットアームのグリッパ、振動デバイス、小型飛行ロボットへの応用などが提案されています。また、発電機への応用も研究されています。
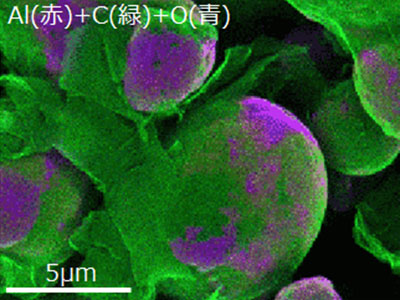
釣糸人工筋肉は、2014年にR. Baughmanらによって発表された熱に応答するソフトアクチュエータです。他ソフトアクチュエータと比べて、高い収縮率と大きな発生力が特徴です。また、ナイロン釣糸など身近な材料で簡単に作製するとができます。ソフトロボット、ロボットハンド、パワーアシストスーツなどへの応用が期待されています。
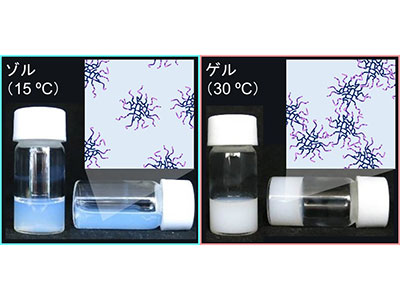
IPMCは、1992年に小黒らにより発見された日本発の技術です。イオン交換膜の両面に金などの電極を接合した3層構造で、水中や湿潤した状態で数Vの電圧を印加すると屈曲します。また、屈曲させると数mV程度の電圧を発生するので、センサとしても研究されています。微細加工技術により、細い短冊状のアクチュエータの作製も可能です。また、3Dプリンティング技術により、温度により硬さが大きく変化する形状記憶ポリマー(Shape memory polymer: SMP)と一体化させるマルチマテリアル技術の開発も行っています。
これらソフトアクチュエータ・センサを用いたロボット技術の確立、デバイスの創出が期待されています。
※このページに含まれる情報は、掲載時点のものになります。