AI作物列認識
AI作物列認識
EVクローラを利用した自動走行システムの開発を行っています。主に玉ねぎ栽培の農作業であるカルチ作業(除草)、ディガー作業(根切り)と、土壌分析のための土壌サンプルの採取の自動化を目指しています。農作業では、㎝精度での繊細な運転を求められるため高い制御性が求められます。AI画像認識による作物列の認識、GPSとIMUによる自己位置推定を利用し自動走行をします。これらを応用することにより、今後、様々な農作業の自動化に対応できます。
動画:EVクローラ型多機能農業用ロボットの全体像
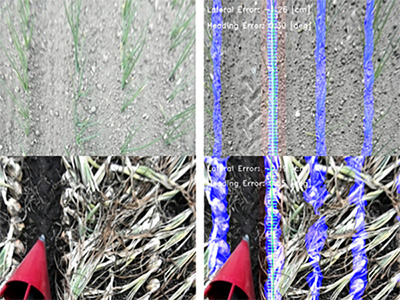
・AI画像認識による自動走行の様子
・GPSとIMUを利用した自動走行の様子
近年の国内農業では、少子高齢化と若年層の都会への流失により、農業従事者の高齢化と新規就業者数の減少が進み、基幹的農業従事者が減少しています。そのため農業従事者の負担が年々増していることが問題となっており、今後もこの傾向は続くと考えられています。これらの解決策として農作業の負担軽減、簡易化による新規農業従事者の増加が挙げられます。
駆動部を電動モーターに変更しクローラのEV化を行いました。PCとモータードライバーをCAN通信で制御しています。燃焼エンジンによる走行に比べ、EV化することにより、高い制御性を獲得できます。また、クローラは地面に接地している面積がタイヤに比べて広く畑のような凹凸が多く柔らかい地面での走行に適しています。
作物を踏まないように自動走行を行う際には、リアルタイムで認識することが求められます。作物のような不定形な物を認識するために、AIによる画像認識を利用します。走行時に記録した画像を元にラベリングを行いAI学習をします。AIが画像を解析し、作物列と事前に設定された目標線との誤差から舵角の補正情報を算出し、それを元に自動走行を行います。学習する作物を変えることで様々な作物に対応させることができます。
GPS情報を利用して、走行経路と土壌サンプルの採取ポイントを等間隔ごとに設定したMAPを作り、IMUでEVクローラの向いている方向をGPSで現在位置を認識し、目標ポイントまでの舵角、距離を算出しその情報をもとに自動走行を行います。採取ポイントごとに一時停止し作業を行います。応用することで車庫から畑までの走行なども今後可能になります。
※このページに含まれる情報は、掲載時点のものになります。