カボチャ認識
カボチャ認識
近年は農作業者の高齢化と人口減少に伴い、一経営体あたりの栽培面積は増加しています。農作業では重労働の作業が多く、作業時間も長くなりがちです。高齢化する農業従事者にとって、農作業の省力化は急務な課題と言えます。本研究では、特に重量野菜であるカボチャと世界の主要醸造用果実であるブドウの収穫作業に焦点をあてています。ロボットとAI技術を用いた、農作業省力化のための自動収穫システムを開発することで、農業従事者の負担を減らし、持続可能な農業への道を開きます。
カボチャ収穫
ブドウ収穫
カボチャは全世界で生産されている重要な野菜であり、国内における生産量は5割以上が北海道です。
カボチャは生命力が強いため、定植後は収穫期まで手をかける必要がなく、生育のための手間が少ないですが、収穫時はカボチャを持ち上げる動作が多く発生するため、腰への負荷がかかりやすいです。カボチャを拾い上げコンテナに積み込む収穫ロボットを開発することで、カボチャの収穫作業を省力化しました。
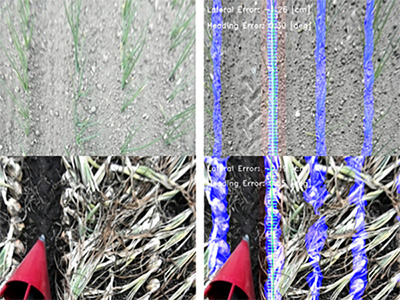
全国の圃場で撮影したカボチャ画像を基に構築したカボチャAI認識システムによって圃場のカボチャを検出します。検出したカボチャ位置にマニュピレータを用いて移動し、収穫用に開発した抱え込み型ロボットハンドでカボチャを把持します。把持したカボチャをコンテナまで運び、カボチャが圃場にある限り収穫動作を繰り返し行います。実際の圃場実験でカボチャ果実の認識率は99.2%,収穫成功率は92.0%と高精度な収穫作業を実現できました。
ブドウは世界で4番目に多く生産されている主要果物です。ブドウにはいろいろな栽培方法があり、生食用ではブドウ狩りでよく見られる棚仕立ての栽培が多いです。ワイン用ブドウでは、棚仕立てではなく、ブドウ果実の房、枝、葉が同じ面に育つ垣根仕立ての栽培が多く、本研究ではこちらの栽培方法を対象に自動化を行います。垣根仕立ての収穫機は欧米にありますが、大型のもので樹そのものを揺らして粒単位での栽培になります。そのため、日本の湿潤な土壌を固めてしまい、樹に悪影響を与えます。よって、ブドウ樹を揺らさず、房単位で収穫を行える小型の収穫ロボットの開発しています。
垣根仕立てのブドウ樹は複雑で、ブドウ房のハサミを入れる場所(カットポイント)はとても小さいため、認識するのが難しいです。このカットポイントを認識するためのシステムを本研究グループで開発し、現在特許を出願しています。検出したカットポイント位置にマニュピレータを用いて移動し、収穫用ロボットハンドでブドウ房を切断保持します。カボチャ同様、コンテナまで運び、収穫可能なブドウがある限り収穫動作を繰り返し行います。実際の圃場実験で昼夜を問わない自動収穫を実現できました。
※このページに含まれる情報は、掲載時点のものになります。