生レポート!大学教授の声
工学の無限の可能性
42.195kmを2時間で駆け抜ける走行ロボットに挑戦!
名古屋工業大学 ロボティクス研究室
佐野 明人

私は、幼少期のころは川や野原で日が暮れるまで遊ぶことが好きな子供でした。建築家になりたい時期もありましたが、動くものに興味がある中で自然と工学部の機械工学科を目指しました。中でも歩くロボットに興味を持ち始め、それが進学した大学の研究室でできることを知ったときは、「やった!」と心から思いました。
大学院を卒業後、早30年、知的探求心の赴くままに研究を続けてきました。若いころは、自ら作ったロボットを思い通りに動かしたいとの思いが強かったのに、受動歩行ロボットに出会って、一変しました。
受動歩行ロボットとは、モータ、センサおよびコンピュータを一切用いずに、ロボットと環境(スロープ)との相互作用のみによって、緩やかな下りスロープを自然な姿で歩きます。動かしていないのに、ヒトそっくりに歩くのは驚きです。歩行は、ヒト特有の現象ではなく単なる物理現象(歩行現象)と捉えることができるのです。したがって、歩行現象の力学的原理(歩行力学)の発見が重要であり、その原理に基づけば100年後にも残る歩行技術が開発できると考えられます。原理が存在すれば逃げることがないので、きっといつかは見つけることができると信じています。これまでに、安定性に関わる原理を発見し、とても簡単な改造を施しただけで13時間45分の連続歩行を達成し、「世界で最も長く歩いた受動歩行ロボット」としてギネス世界記録に認定(2009年5月)されたときの喜びと感動は今でも忘れません。
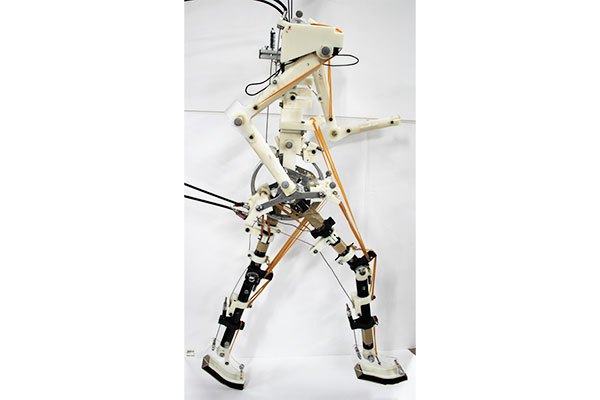
さて、この受動歩行現象と人工知能は一見関係がないように思えますが、力学的な構造に歩行に必要な計算が埋め込まれている、コンピュータもないのに十分に知的な動きをするといった指摘が人工知能の分野でもなされています。このようなことから、現在研究室では深層強化学習などの人工知能との融合にも取り組んでいます。さらに、10年ほど前から走行現象の研究も始め、写真のような走行ロボットで、将来フルマラソンを2時間切る前人未到の壮大な夢を学生と共に抱いています。
最後に、次の言葉を皆さんに贈ります。既存の工学の枠組みにとらわれることなく、工学が本来有する無限の可能性を信じ、新たな価値の創造に挑戦する(名古屋工業大学憲章より)。
| 掲載大学 学部 |
名古屋工業大学 工学部 | 名古屋工業大学 工学部のページへ>> |
関連記事






名古屋工業大学
工学部
- 生命・応用化学科 生命・物質化学分野
- 生命・応用化学科 ソフトマテリアル分野
- 生命・応用化学科 環境セラミックス分野
- 物理工学科 材料機能分野
- 物理工学科 応用物理分野
- 電気・機械工学科 電気電子分野
- 電気・機械工学科 機械工学分野
- 情報工学科 ネットワーク分野
- 情報工学科 知能情報分野
- 情報工学科 メディア情報分野
- 社会工学科 建築・デザイン分野
- 社会工学科 環境都市分野
- 社会工学科 経営システム分野
- 創造工学教育課程
- 基幹工学教育課程
学校記事一覧


(>>会員用ページ)
| 私たちが考える未来/地球を救う科学技術の定義 | 現在、環境問題や枯渇資源問題など、さまざまな問題に直面しています。 これまでもわたしたちの生活を身近に支えてきた”工学” が、これから直面する問題を解決するために重要な役割を担っていると考えます。 |