
日本は、四方を海に囲まれた国であり、限りある資源を有効活用していく必要があります。そこで、海中・海底を自律的に活動する自律型水中ロボットが、近年注目されています。自律型水中ロボットには、水中汚染物(放射能汚染物等含む)の発見・回収、深海底地形調査・資源回収、機雷撤去、水産資源育成・捕獲、海難事故対応などさまざまなニーズがあります。しかしながら、水中ロボットは地上で動作するロボットとは異なり、①水中では、無線による通信が不可能、したがって航空・宇宙で用いられているGPSを用いた位置の特定ができない、②ロボット技術者が近くで状況を確認することは難しい、③浮遊航行体の運動制御であるため水中ロボットが振動しやすい、④海底での作業は底泥巻き上げによる視界不良が発生しやすいなど、地上ロボットに比べて困難な点が多くあります。
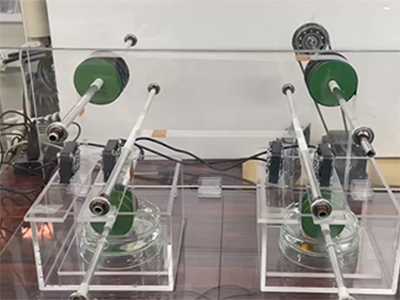
海洋開発技術や水中ロボットの技術開発の特徴は、「実験実証的に開発を進める」という点にあり、実験室のみでの研究だけでは不十分です。そこで、岡山大学工学部の見浪護教授らによる研究グループでは、岡山大学理学部附属牛窓臨海実験所に充電ステーションを建設し深夜の海を利用して深海模擬環境を作り出し、(a)帰巣、(b)嵌合、(c)充電、(d)離脱、(e)海底想定タスク、を繰り返す深海自律行動シナリオを達成する海底長期滞在型水中ロボットの開発と実証実験を行う実験場として、水中ロボットを投入するための固定桟橋の構築を行いました。
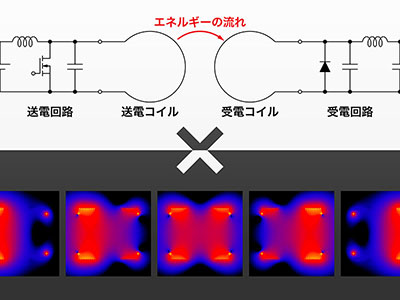
また、本研究グループでは自律的に海中を活動するための水中ロボットに関する研究をしています。例えば、水中ロボットが自動で長い時間活動するためには、ロボットのバッテリーが少なくなってきた時に、充電スポットに帰還し、充電を行わなければなりません。しかしながら、この充電プラグをコンセントに差し込むことは、海のような水中環境では、太陽光などの光環境や海流などが時々刻々と変化するため、ロボットにとって非常に困難な作業になります。そこで、2台のカメラを用いることによって、動物のように環境を3次元的に精度良く、高速に認識する技術を実現し、実際の海の環境で充電動作を長時間連続で行うことに成功しています。このように、海といった2度と同じ環境が存在しない極限環境下で、水中ロボットが自律的に活動するための新しい技術開発に挑戦しています。
岡山大学で開発された水中ロボットのためのドッキング制御技術を用いて、現在様々な取り組みへの活用を目指しております。その中の1つとして、公益財団法人日本財団および株式会社リバネスの共同事業であるDeSET Projectがあります。本プロジェクトでは、分解能が100m以下の海底地形図を地球上の全海域に渡って作成することを最終目標としており、岡山大学は、「量産型海中・海底ステーションの構築」を目的としたチームの一員として活動しています。具体的には、海底と海中に水中ロボットのハブとなるステーションを設置し、そこでデータ収集と水中ロボットの給電を行うためのステーションを建造することを目的としており、圧縮強度の強さやコスト、劣化性、リサイクルの観点などから、海中建造物の素材としてコンクリートが適しているという仮説を立て、3Dプリンタを用いたコンクリート建造物製造技術の開発と実証を目標として掲げています。このような中、岡山大学では、これまでに研究開発したドッキング制御を活かし、建造されたステーションにドッキングをすることで、海底・海中での長時間での作業を可能とする技術の実現を目指し活動しています。
※このページに含まれる情報は、掲載時点のものになります。