
かつてSFの世界の話だった「人間と共に生活するロボット」が、急速に現実のものとなりつつあります。その背景にあるのは、生成AIに代表される知能の進化と、軽量・高効率なアクチュエータによる身体性の向上です。高度な状況判断と俊敏な動作が可能になったことで、ヒューマノイドロボットの実用性はかつてない高まりを見せています。
この技術革新を象徴するのが、中国における熱狂的な開発競争です。そこではマラソン大会などでロボットの性能が誇示され、実験室レベルを超えた耐久性と運動能力を備えつつあることを世界に知らしめています。
そして、技術的到達点がもたらす最大の変革は「量産化」による「低価格化」です。製造コストが高級車並み、あるいはそれ以下に低下する見通しが立ち、産業用途を超えて一般家庭へ普及する未来が現実味を帯びてきました。家事や介護の担い手として、ロボットが家族の一員となる日はそう遠くないかもしれません。私たちは今、スマートフォン登場時にも匹敵する社会的インパクトを持つ「家庭用ヒューマノイドロボット時代」の入り口に立っているのです。
 ヒューマノイドロボットの競技
ヒューマノイドロボットの競技
このように、急速に進化を遂げるテクノロジーの分野において、現在、AI搭載型ヒューマノイドロボットが大きな転換期を迎えています。
これまでもヒューマノイドは、階段やドアの開閉など、人間のために設計された既存の環境への適応性の高さから、長年にわたり研究開発が進められてきましたが、近年のAI技術の飛躍的な進歩と、身体を動かすためのアクチュエータの高性能化が組み合わさったことで、状況は一変しました。これまでの「実験室での研究段階」から、実社会における「汎用的な労働力」として期待されるフェーズへと、確実に移行しつつあります。
この進化の最大の要因として、「ロボット基盤モデル」の登場が挙げられます。これは、テキストや画像だけでなく、物理世界での動作そのものを学習し、多様な状況に対応できる汎用性を獲得するための技術です。このモデルの登場により、ロボットの知能は以前とは比較にならないほどの向上を見せており、複雑な判断を伴う動作も可能になりつつあります。
しかし一方で、AIという「頭脳」がいかに進化しても、それだけで物理的な作業が完結するわけではありません。現実世界で実際に仕事をするためには、その指令を物理的に実行するための「身体」、すなわちハードウェアが不可欠です。中でも、多様な形状の物体を器用に扱うための「ロボットハンド」の研究開発は、避けては通れない重要な課題となっています。
アクチュエータの進化により、歩行を行う脚部や、物を運ぶ腕部の性能は著しく向上しました。しかし、人間の手のように繊細かつ複雑で多彩な動きを実現するためには、狭いスペースに多数の関節やセンサーを密集させる必要があり、その開発は依然として困難を極めています。真に汎用的なヒューマノイドロボットを実現するためには、AIというソフト面の進化だけでは不十分であり、その知能を物理世界で具現化するためのハードウェア、とりわけ「手」の技術革新がこれまで以上に求められているのです。
こうした背景を踏まえ、我々の研究チームでは現在、人間と同等のサイズでありながら、人間と同じように多様な作業をこなせるロボットハンドの研究開発に取り組んでいます。人間並みの作業を実現するには、サイズ感だけでなく、発揮できる力や動作の器用さにおいても人間と同等のスペックが不可欠です。しかし、既存のアクチュエータをハンド内部に全て搭載しようとすると、人間と同じサイズに収めれば出力不足により非力になり、逆に高出力を求めれば大型化して人間の道具が扱えなくなるというジレンマがありました。
この課題を解決するため、我々は駆動源(モーター等)をハンド本体から分離し、腱(ワイヤー)を介して各関節を遠隔で動かす「腱駆動方式」を採用しています。これにより、ハンド部分の軽量化・コンパクト化と、高出力化の両立を目指しています。一方で、腱駆動にはワイヤーの弾性による伸びや摩擦の影響が生じるため、ダイレクトな駆動に比べて正確な位置制御や力制御が難しくなるという側面もあります。現在は、この制御性の問題を克服するための新たな制御アルゴリズムや機構の構築に向けて、鋭意研究を進めているところです。
また、物理的な労働力の代替だけでなく、人間の心に寄り添う「コンパニオンロボット」の研究も並行して進めています。現代社会において、人間は肉体的な負担だけでなく、精神的なストレスや孤独感といった内面的な課題にも直面しています。しかし、一人の人間に対して他者が24時間常に付き添い、メンタルケアを行い続けることは人的リソースの観点からも現実的ではありません。
そこで、我々はロボットがその役割を担うための技術開発を行っています。単に作業を肩代わりするだけでなく、ロボットが人の動作や声色から心理状態を推定し、適切な対話や振る舞いを通じてユーザーの精神的な安定や幸福感(ウェルビーイング)の向上に寄与することを目指しています。物理的な苦役からの解放と精神的なケアの両面からアプローチすることで、人とロボットが真に共生できる未来社会の実現に貢献していきます。
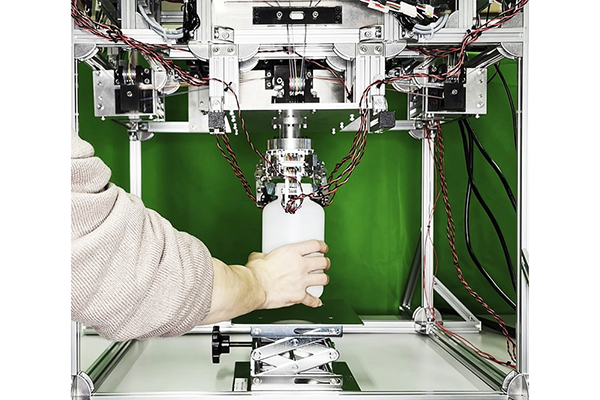
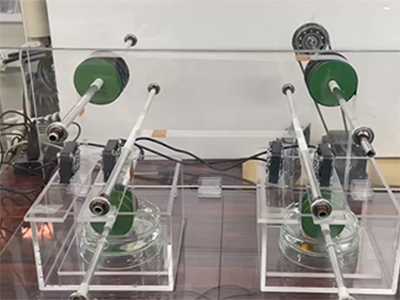
研究開発中のロボットハンド

研究開発中のコンパニオンロボット
※このページに含まれる情報は、掲載時点のものになります。