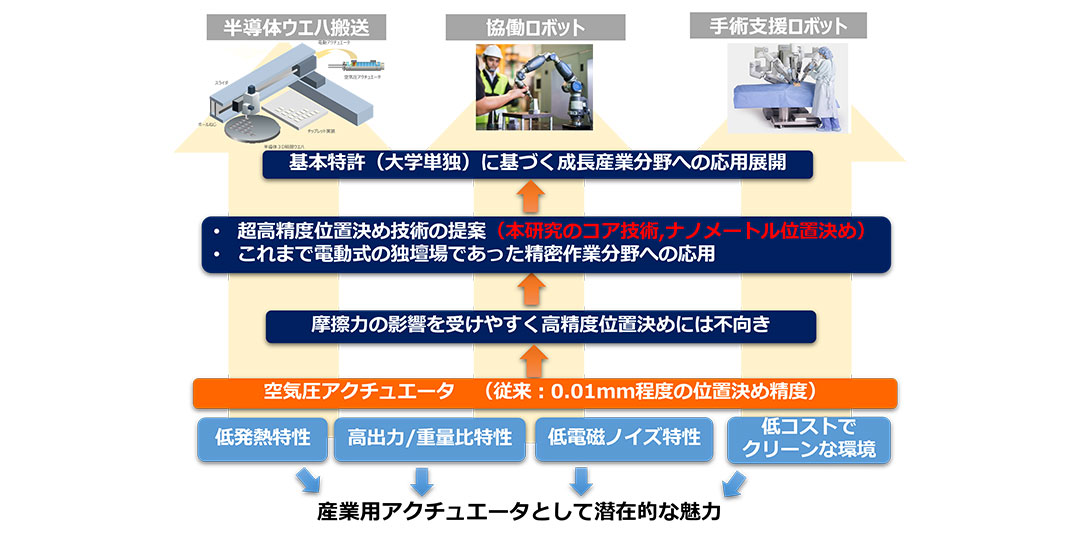
エアシリンダをはじめとする空気圧アクチュエータは①原理的に発熱しない、②出力/重量比が高い、③電磁ノイズを出さず、その影響も受けない、④導入コストも低く環境に優しいなど、産業用アクチュエータとして多くの魅力を潜在的に有する反面、その用途は単純な当て止め方式による搬送作業など限定的な状況にあります。これは、空気の圧縮性による低剛性特性のため、動作時に摩擦力の影響を受けやすく、任意点での高精度位置決めが容易でないためです。一般的なエアシリンダの位置決め精度は0.01mm程度とされ、また、固着と滑りを繰り返すスティック・スリップ現象の改善が大きな課題でした。そのため、空気圧アクチュエータにおける超高精度位置決め技術が確立されれば、製造業を中心とする産業界に大きなインパクトを与えることが可能となり、半導体製造装置、協働ロボット、ならびに手術支援ロボットなど、今後成長が見込まれる産業分野における国際競争力強化への貢献が期待できます。
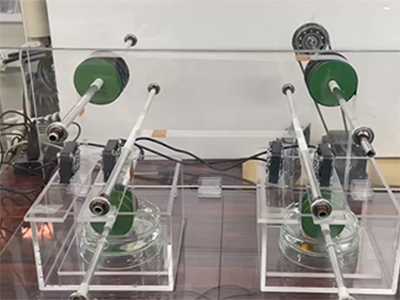
徳島大学理工学部 髙岩昌弘教授の研究グループでは、弾性パッキンでシールされた汎用型の空気圧アクチュエータにおける超精密位置決め制御手法を提案しています。これは、摩擦力が大きく作用する環境においても、目標位置近傍に設定した数ナノメートルの閾値内にピストンロッド変位を強引に誘導する項と、閾値内に入ったらそこから抜け出せないように強力にホールドする項からなるアルゴリズムにより、これまで0.01ミリメートル程度が限界であった位置決め精度を数ナノメートルまで改善することに成功しました。図1はピストンロッド先端位置を1nm毎、5ステップ分往復動作を行ったものです。信号の中央値は完全に目標軌道をトラッキングしており、駆動分解能が1ナノメートルであることがわかります。空気圧アクチュエータでは、電動アクチュエータでしばしば問題となる発熱の心配がないため、半導体製造装置などの精密作業分野への応用が期待できます。
一方、本提案アルゴリズムはメインコントローラではなく補償器として実装しており、その補償信号は任意のタイミングでのON/OFFが可能です。補償信号をOFFにすれば空気圧サーボ本来の柔軟性により、環境との接触時における外力吸収が安全機能として作用し、補償信号をONにした瞬間にサーボ剛性が飛躍的に高まり、高精度位置決めが実現されます。このように作業場面に応じた可変剛性機能は、人と並んで作業をする協働ロボット用アクチュエータとして大変有益です。
また、動画1はマウス操作により、ピストンロッド変位を数ナノメートルの範囲で手動により変位させている様子です。これより微細な血管縫合を伴う手術支援ロボットや原子・分子操作用マニピュレーションへの応用が期待できます。
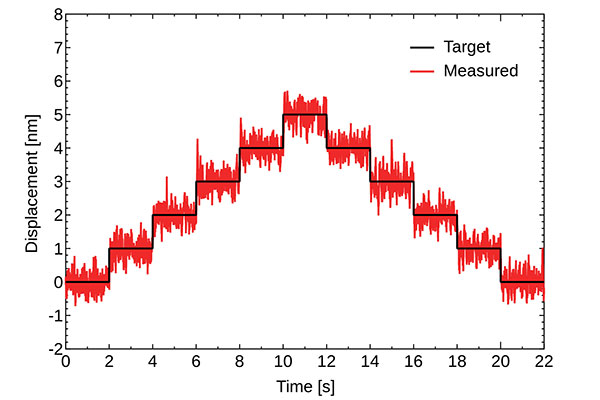 図1
図1
本研究では汎用型空気圧アクチュエータにおいて定常的な位置決め誤差を飛躍的に低減する高精度化補償器を提案し、その有用性を検証してきました。今後のさらなる高機能化に対応するには、サブナノメートルオーダでの位置決め精度が要求されます。本研究では両シリンダ室を独立に制御することで圧力レベルを任意に調整する機能を通して、さらなる精度向上の可能性が確認されています。また、動的な目標軌道への追従性能の向上のために、制御対象のパラメータ変動に対するロバスト性の向上とフィードフォワード制御を組み合わせたダイナミクス補償による目標軌道追従性能の検証も今後進めていきます。
提案手法は、動作媒体を選ばないため、油圧サーボや電動ステージへの応用も原理的に可能です。このような種々のアクチュエータへの横展開を通して、各種メーカーやアカデミアにおける協力を仰ぎながら、ものづくり産業における国際競争力強化に貢献していきたいと考えています。
※このページに含まれる情報は、掲載時点のものになります。