環境への取り組み
海洋ロボット(ROV)を使って磯焼け防止の実現

2019年12月20日
関東地区
東京海洋大学 海洋工学部
海洋電子機械工学科 電子制御研究室 准教授 田原淳一郎
東京海洋大学は海洋に特化した大学です。そのため海洋環境保全・調査・クリーンな海洋環境の工学的応用へ取り組んでいます。その中でも近年注目されている分野として海洋ロボットがあります。海洋ロボットは本学でも熱心に研究が行われ成果を上げつつあります。潜水艦の様に水中を自動航行する自律型無人潜水機 (Autonomous Underwater Vehicle: AUV)や遠隔操作型無人潜水機(Remotely Operated Vehicle: ROV)、無人船(Autonomous Surface Vehicle: ASV)が有ります。いままで、海洋ロボットは調査を目的とした利用方法で深海3000mの調査等で実績を上げています。しかし、未だ海洋ロボットを水産業の直接的な捕獲に利用している例はありません。そこで、我々は現在問題となっている磯焼けを防止するためにウニを採捕する海洋ロボットを開発しています(図1)。
 (図1) 開発中の水中ロボット
(図1) 開発中の水中ロボット磯焼けは海中の豊かな藻場がウニによって食い荒らされる現象です。これにより岩場が砂漠の状態となりウニ以外の生物がいない環境となってしまいます。そのため漁業や生物多様性の観点から問題です。原因は地球温暖化・海水の富栄養化等いろいろな原因が言われていますが未だはっきりしていません。東北地域では震災以後に発生した例が多くあり本学では農林水産省の食料生産地域再生のための先端技術展開事業の中で、「異常発生したウニの効率的駆除及び有効利用に関する実証研究」を行っています(図2)。
本研究はROVを使ってウニを駆除し、磯焼けを回復する。また駆除したウニを畜養し商品とする。商品のウニを自動的に剥き身にして出荷する。というプロジェクトです。
これは、本学の海洋工学部だけでなく海洋生命科学部および海洋資源環境学部の先生方のご協力も得ながら、宮城県、東北大、宮城大とも連携し実現を目指しています。
 (図2) 異常発生したウニの効率的駆除及び有効利用に関する実証研究
(図2) 異常発生したウニの効率的駆除及び有効利用に関する実証研究 私(電子制御研究室)は、専門の制御と電子回路技術を使いウニ採捕ROVの開発をおこなっています。現在、ROVは道半ばと言うところですが、Deep Learningを使ったウニの画像認識(図3)やROVの高性能な運動制御システムは完成に近づきつつあります。
本システムが完成すれば、磯焼け海域のウニをROVで採捕、蓄養することで有効な資源の利活用が実現するばかりか、やがて磯焼けが解消され、豊かな藻場が帰ってくる事と思います。よって、海洋ロボットを使う事で、漁業と海にかかわる持続可能な開発目標(Sustainable Development Goals: SDGs)の実現にも貢献できると考えています。
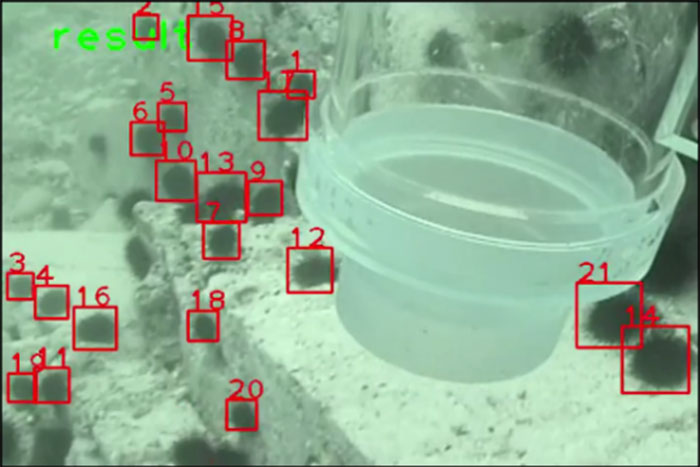 (図3)Deep Learningで認識されたウニ
(図3)Deep Learningで認識されたウニ| 掲載大学 学部 |
東京海洋大学 海洋工学部 | 東京海洋大学 海洋工学部のページへ>> |
関連記事





東京海洋大学
海洋工学部
- 海事システム工学科
- 海洋電子機械工学科
- 流通情報工学科