なんでも探検隊
脚型モジュラーロボットの協調制御
静岡大学 工学部

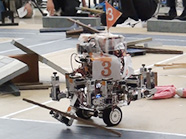
私の専門分野は「ロボット工学」です。ロボットと一言でいっても、車輪型ロボット・人型ロボット・動物型ロボット・昆虫型ロボット・ヘビ型ロボットなど、その種類は多岐にわたります。私の研究では、脚をもっているロボット同士が結合・分離する能力を備えている「脚型モジュラーロボット」を対象としています。脚型モジュラーロボットは互いのつながり方を変えて結合体の形を変幻自在に変えることで、動物型ロボットや昆虫型ロボットなど、脚をもつ様々なロボットに変形することができます。このように変幻自在にロボットの形が変わることは、実用的には多様なタスクを遂行できるという利点があります。
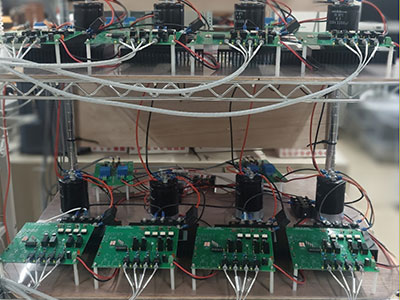
さて、具体的なモジュラーロボットの研究としては、モジュールのハードウェア開発と、モジュールの制御則構築に分類することができ、私はその両面から研究を進めています。モジュールのハードウェア開発においては、モジュールの小型化と結合体の多機能性を両立するために、結合機構やモータ駆動部を新たに開発しています。一方でモジュールの制御則構築に関しては、一つの結合体内部におけるモジュール同士の協調というミクロな視点からの研究だけでなく、結合体同士の協調というマクロな視点からの研究を進めています。
ミクロな視点からの研究においては、「一つの多脚ロボット結合体が不整地を安全に歩行するために、結合体内部の各モジュールはどのように振る舞えばよいか」を研究してきました。また、マクロな視点からの研究においては、社会性昆虫であるアリの分業の仕組みに着目し、「各アリ個体は日々変化する環境においてコロニーを長く存続させるためにどのような振る舞いをしているのか」を研究してきました。
私の将来目標としては、こうした研究を統合させて一つのモジュラーロボットシステムを完成させることです。その先に、モジュラーロボットが実際に運用されて人々の役に立つ姿を夢見ています。
| 掲載大学 学部 |
静岡大学 工学部 | 静岡大学 工学部のページへ>> |
関連記事





静岡大学
工学部
- 機械工学科(宇宙・環境コース)
- 機械工学科(知能・材料コース)
- 機械工学科(光電・精密コース)
- 電気電子工学科(情報エレクトロニクスコース)
- 電気電子工学科(エネルギー・電子制御コース)
- 電子物質科学科(電子物理デバイスコース)
- 電子物質科学科(材料エネルギー化学コース)
- 化学バイオ工学科(環境応用化学コース)
- 化学バイオ工学科(バイオ応用工学コース)
- 数理システム工学科
学校記事一覧

(>>会員用ページ)
| 私たちが考える未来/地球を救う科学技術の定義 | 現在、環境問題や枯渇資源問題など、さまざまな問題に直面しています。 これまでもわたしたちの生活を身近に支えてきた”工学” が、これから直面する問題を解決するために重要な役割を担っていると考えます。 |