なんでも探検隊
実用的なマルチコプターの自動操縦法を開発
佐賀大学 理工学部
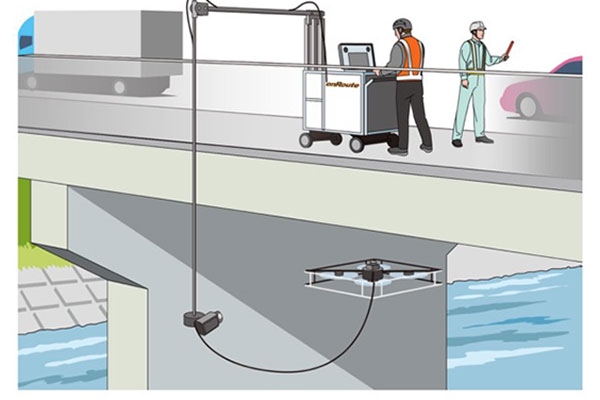 図1 エンルート社による橋梁点検のイメージ
図1 エンルート社による橋梁点検のイメージ(エンルート社ソリューションのサイトよりhttp://www.enroute.co.jp/home/solutions/)
2016年4月の熊本地震では、小型無人飛行機であるマルチコプター(ドローン)が早期に投入され、マルチコプターに搭載したビデオカメラで被災現場の鮮明な動画を見ることができました。また、国内には約70万カ所に橋梁があり、2023年には約4割が耐用年数を迎えるそうです。そこで、マルチコプターに搭載したビデオカメラにより、橋梁、トンネル、ダムの劣化・損傷箇所を撮影して保全に役立てる実証実験が進んでいます。現在、マルチコプターの多くはGPS(global positioning system。カーナビで現在位置の表示に使用)を使い、事前に指定した地点を自動飛行するか、熟練した操縦者が手動操縦するのが一般的です。カーナビは、タイヤの回転数や多くのセンサー情報より自車位置を正確に得ます。
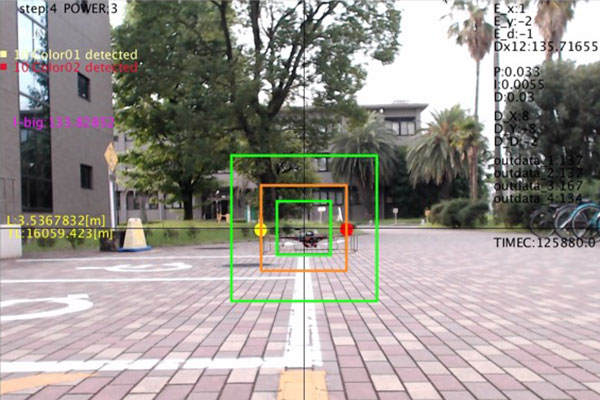 図2 実験の様子
図2 実験の様子(ビデオカメラの映像)
一方、マルチコプターは空中を飛行するので、車ほどたくさんのセンサーが使えず、GPSを使っても現状では2~3メートルの位置誤差が生じます。また、橋梁の裏面などではGPSの信号は受信できません。実用的なマルチコプター(数キロの物体を搭載可能)の手動操縦は思ったほど簡単ではなく、操縦訓練が必要です。佐賀大学理工学部機械システム工学科の佐藤和也研究室では、図1のように橋梁上からビデオカメラを吊り下げ、ビデオ画像を用いたマルチコプターの自動操縦法を企業と共同研究しています。これまでに、1つのビデオカメラのみでマルチコプターを3次元空間内で自動的に飛行させる方法を開発しました(図2を参照)。これよりマルチコプターはGPSを使わずに、決められた場所に自動的に飛行可能となり、マルチコプターに搭載したビデオカメラにより橋梁の裏面の必要な箇所などが撮影できます。
 図3 タブレットPCにるマルチコプターの操縦
図3 タブレットPCにるマルチコプターの操縦またタブレットPCの背面カメラでマルチコプターを撮影し、タブレットPCの向きを変えたり、画面内の枠の大きさを変える簡単な操作で、マルチコプターが自由自在に操縦可能となる方法を開発しました(図3参照)。実験の様子を動画公開サイト(https://www.youtube.com/user/KazuyaSatoLab)で公開しています。動くものを思いどおりに自動的に動かすためには「制御工学」という分野が重要で、おもに機械系や電気系の学科で学びます。当研究室では、今後も移動物体の位置などを自動的に制御するための研究・開発を進めていく予定です。
| 掲載大学 学部 |
佐賀大学 理工学部 | 佐賀大学 理工学部のページへ>> |
関連記事






佐賀大学
理工学部
- 数理サイエンスコース
- データサイエンスコース
- 知能情報システム工学コース
- 情報ネットワーク工学コース
- 生命化学コース
- 応用化学コース
- 物理学コース
- 機械エネルギー工学コース
- メカニカルデザインコース
- 電気エネルギー工学コース
- 電子デバイス工学コース
- 都市基盤工学コース
- 建築環境デザインコース
学校記事一覧

(>>会員用ページ)
| 私たちが考える未来/地球を救う科学技術の定義 | 現在、環境問題や枯渇資源問題など、さまざまな問題に直面しています。 これまでもわたしたちの生活を身近に支えてきた”工学” が、これから直面する問題を解決するために重要な役割を担っていると考えます。 |