おもしろ科学実験室(工学のふしぎな世界)
機械と生物から学ぶロボットの作りかた
埼玉大学工学部
機械工学・システムデザイン学科
1.はじめに
生物模倣(バイオミメティクス)という研究分野があります。生物の身体や機能、行動などから着想を得て、新しい技術の開発やものづくりに活かそうとする研究分野です。そしてロボット工学の分野でもネコ型ロボット、イルカ型ロボット、チョウ型ロボットなど生物を模倣した多くのロボットがこれまでに開発されているのですが、今回はそれらのロボットの中からヘビ型ロボットを取り上げます。ヘビは単純な紐状の形をしており、自分の身体を屈曲させて蛇行運動することで移動します。生物のヘビを模倣して高機能なロボットが世界中で開発されていますが、多数のモータやコンピュータ、プログラムが必要になり個人では製作が大変難しい場合があります。
そこで今回ご紹介するのが、モータ1個のみを用いてヘビのように身体を蛇行運動させながら進むヘビ型ロボットです。このロボットはコンピュータやセンサなどの電子部品やプログラムも必要としないので、組み立ててスイッチを押すだけで動き出します。
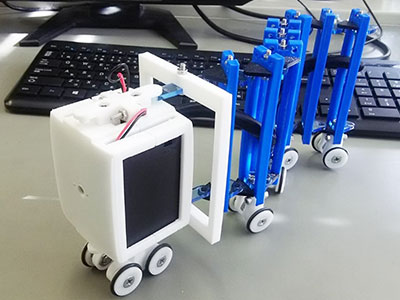 図1 モータ1個で動作するヘビ型ロボット
図1 モータ1個で動作するヘビ型ロボット
2.ロボットの移動原理
ヘビの身体は身体に沿った方向には滑りやすく身体と垂直な方向には滑りにくい性質になっています。そこで自身の身体を蛇行させた時に発生する地面との摩擦による反力を利用し、身体方向に進みます。ちょうどこれはローラースケートやアイススケートと同じ推進原理になっています。ただヘビは種にもよりますが関節が200以上もある生物です。ヘビは筋肉により関節を駆動するのですが、ロボットではモータにより関節を駆動する場合がほとんどです。したがって、ヘビを模倣してロボットを作ろうと単純に考えると200個以上ものモータが必要になってしまいます。この問題を解決するために今回はたった1つのモータを使ってヘビの運動を再現できる装置を使います。この装置を使うと、ヘビの蛇行によって生成される進行波というヘビの推進に深く関係している波を生成できます。なお進行波とは時間経過とともに空間内を移動していく波を意味しています。コイルばねの中心軸方向への投影が円であり側面方向への投影が正弦波であることに着目し、コイルばね、つまりらせんを回転させて進行波を作り出すことのできる装置です。今回のヘビ型ロボットは機械と生物の両者から学んだ技術が核になっています。
3.準備するもの
- ロボット部品(自分で製作する必要があるもの)
- モーターボックス 2個
- ボックスジョイント 4個
- ファーストリンクA 2個
- ファーストリンクB 1個
- リンクA 8個
- リンクB凸型 18個
- リンクB凹型 18個
- らせん型ガイド 1個
- タイヤホルダーA 2個
- タイヤホルダーB 10個
- M3✕15mm 38個
- M3六角ナット 38個
- M2✕5mm低頭ボルト 2個
- M6六角ナット 14個
- ギヤードモーター(型番:NS-16SG-45-12G162A1) 1個
- 電池ボックス(型番:USBH-441AS) 2個
- 樹脂ベアリング DU【外輪U溝タイプ】(型番:DU-19-B0.5) 14個
- Oリング(型番:AS568) 14個
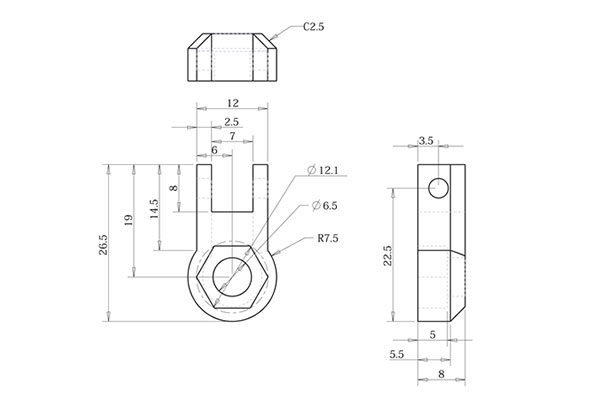
4.ロボット部品の寸法
これらの寸法を参考にCADでモデルを作成し、3Dプリンタを使えば必要な部品が作成できます。材料はPLAフィラメント等で十分ですが、らせん型ガイドの表面を滑らかにすると動作が良好になります。
 (1) モーターボックス
(1) モーターボックス
 (2) ボックスジョイント
(2) ボックスジョイント
 (3) ファーストリンクA
(3) ファーストリンクA
 (4) ファーストリンクB
(4) ファーストリンクB
 (5) リンクA
(5) リンクA
 (6) リンクB凸型
(6) リンクB凸型
 (7) リンクB凹型
(7) リンクB凹型
 (8) らせん型ガイド
(8) らせん型ガイド
 (9) タイヤホルダーA
(9) タイヤホルダーA
 (10) タイヤホルダーB
(10) タイヤホルダーB
5.ヘビ型ロボットの組立方法
 (1) ファーストリンクの組立
(1) ファーストリンクの組立
 (2) タイヤホルダーAの組立
(2) タイヤホルダーAの組立
 (3) モータの取付
(3) モータの取付
 (4) ファーストリンクの取付
(4) ファーストリンクの取付
 (5) 電池ボックスの取付
(5) 電池ボックスの取付
 (6) モーターボックスの組立1
(6) モーターボックスの組立1
 (7) モーターボックスの組立2
(7) モーターボックスの組立2
 (8) らせん型ガイドの取付
(8) らせん型ガイドの取付
 (9) リンクの組立
(9) リンクの組立
 (10) リンクの連結1
(10) リンクの連結1
 (11) タイヤホルダーBの組立
(11) タイヤホルダーBの組立
 (12) タイヤの取付
(12) タイヤの取付
 (13) リンクの連結2
(13) リンクの連結2
 (14) 完成
(14) 完成
| 掲載大学 学部 |
埼玉大学 工学部 | 埼玉大学 工学部のページへ>> |
関連記事






埼玉大学
工学部
- 機械工学・システムデザイン学科
- 電気電子物理工学科
- 情報工学科
- 応用化学科
- 環境社会デザイン学科