なんでも探検隊
橋の裏側にくっつくドローンでプロペラを止めてじっくり点検
京都工芸繊維大学
機械工学課程 ロボティクス研究室
日本には約72万橋以上の橋梁が架けられていますが高度経済成長期に建造されたものが多く、その老朽化が社会問題となっています。一方で点検に必要な足場設置のコストが高く、点検できる技術者が不足しているということもあり、必ずしも十分な点検が行われていないという現状があります。近年ではドローンの普及により高所での撮影も安全かつ容易になってきましたが、点検中にプロペラを回転させ続けるためバッテリの消費が大きく、長時間の点検には不向きです。また、橋梁外観の撮影を主としており、構造部材内側の詳細な点検や接触を伴う点検作業を実施することはできません。
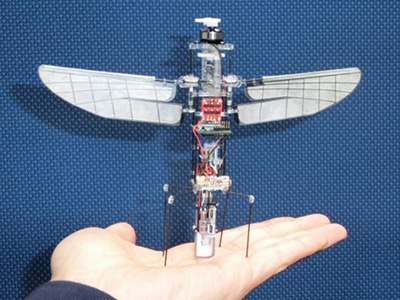
機械工学課程ロボティクス研究室では図1のように橋梁に使用されている鋼材に吸着し、プロペラを停止した状態で鋼材の内側なども点検が可能なドローンの開発を行っています。
 図1 吸着可能なドローンによる鋼材点検
図1 吸着可能なドローンによる鋼材点検エネルギー消費が少ない鋼材への吸着方法を考えた場合、永久磁石で吸着すると電力を消費せずに吸着できますが、強力な永久磁石で吸着すると引き剥がす際に大きな力が必要となります。一方で、電磁石を使用すると吸着・離脱の制御は容易ですが、吸着して点検している最中は常に電力を消費することになります。そこでElectro-permanent Magnet(EPM)と呼ばれる、永久磁石と電磁石の両方の特性を持つような吸着機構を使用しています。
EPMは図2のようにアルニコ磁石、ネオジム磁石、コイル、ヨーク(鉄)から構成されており、ネオジム磁石とアルニコ磁石の極性が同方向の場合(図b)は磁束がヨークから外に漏れ出て、鋼材などの磁性体に吸着することができます。この時、永久磁石の磁力で吸着しているため吸着中は電力を消費しません。アルニコ磁石は周囲の磁界により極性を変化させることができるため、コイルにパルス電流を流し、アルニコ磁石の極性を変化させ、ネオジム磁石の極性と逆方向(図a)にすると磁束が2つの永久磁石内で閉じるため吸着しない状態、つまり鋼材から離脱する状態になります。吸着・離脱の切り替えは瞬間的に流れるパルス状の電流により制御されるため、わずかな電力で切り替えが可能です。
 図2 EPMの動作と写真
図2 EPMの動作と写真EPMを利用した磁気吸着機構のほか、GPSが使用できない橋梁の下でも自律飛行を可能にするナビゲーション技術や点検用のアームを開発しており、ドローンが社会で活躍できるよう研究を進めています(図3)。
 図3 鋼材吸着中のドローン
図3 鋼材吸着中のドローン| 掲載大学 学部 |
京都工芸繊維大学 工芸科学部 | 京都工芸繊維大学 工芸科学部のページへ>> |
関連記事





京都工芸繊維大学
工芸科学部
- 応用生物学課程
- 応用化学課程
- 電子システム工学課程
- 情報工学課程
- 機械工学課程
- デザイン・建築学課程
学校記事一覧

(>>会員用ページ)
| 私たちが考える未来/地球を救う科学技術の定義 | 現在、環境問題や枯渇資源問題など、さまざまな問題に直面しています。 これまでもわたしたちの生活を身近に支えてきた”工学” が、これから直面する問題を解決するために重要な役割を担っていると考えます。 |