おもしろ科学実験室(工学のふしぎな世界)
光移動ロボットの仕組みとその作り方
三重大学 総合工学科 機械工学コース
松井博和
1. はじめに
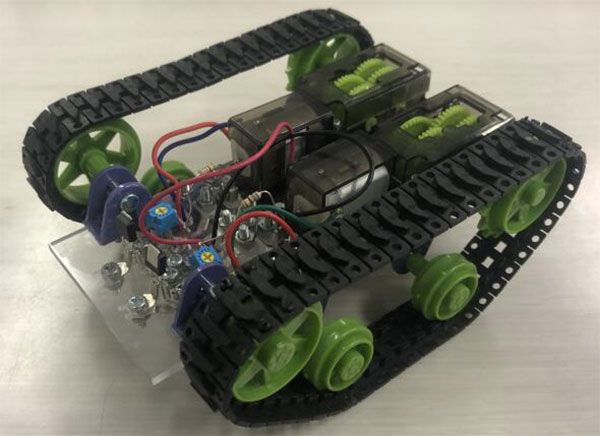 Fig. 1 光移動ロボット(前進方向左)
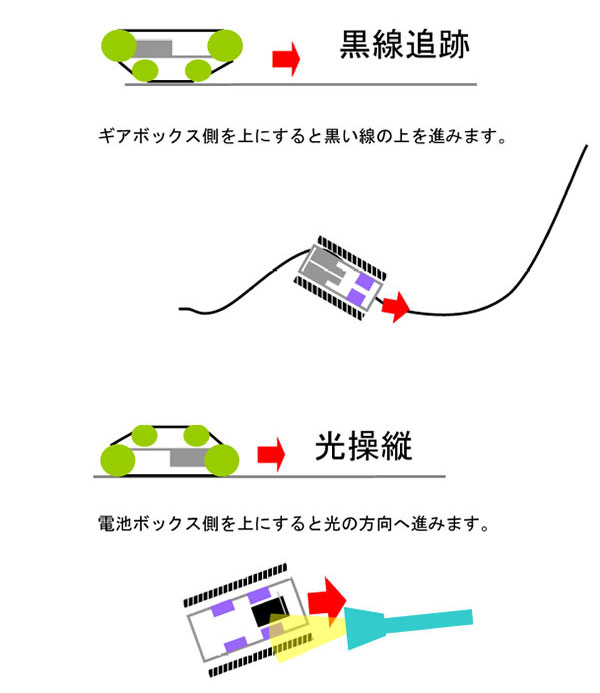
Fig. 1 光移動ロボット(前進方向左)ここでは、私が設計した光移動ロボット(Fig.1)を紹介する。本機は、デジタル回路はもちいず、アナログ電子回路とモータとクローラから成る単純なメカトロニクス機器である。本機の機能の一つは、光学ライントレーサーであり、白い(光を反射する色)背景に、ある幅の黒い(光を吸収する色)ラインを引くと、その黒いラインを辿るように走ることができる。また、もう一つは、本機をひっくり返してスポット光を当てることで誘導もできる。
製作においては、穴あけ加工した板にクローラやギアボックスなどの機械機構だけでなく、電子部品もネジ止めするだけで組み上げられる。それにより、ハンダをもちいず電子回路がつくれるようにも工夫してある。
本光移動ロボットは、小学生高学年以上を対象とするロボット教室用に考えたものである。2020年1月11日のロボット教室では、穴あけ加工済み板と各足に圧着端子を取り付けた電子部品を事前に用意し実施した。
2. 動作説明
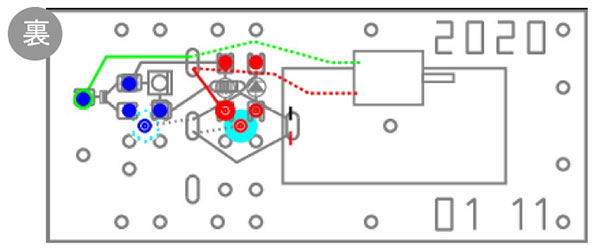
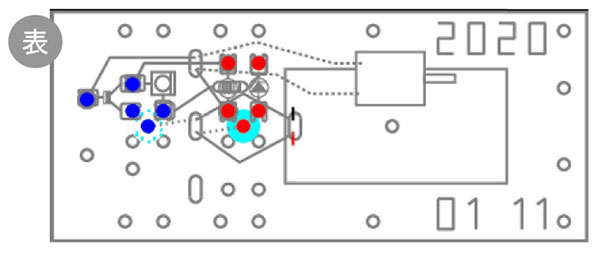
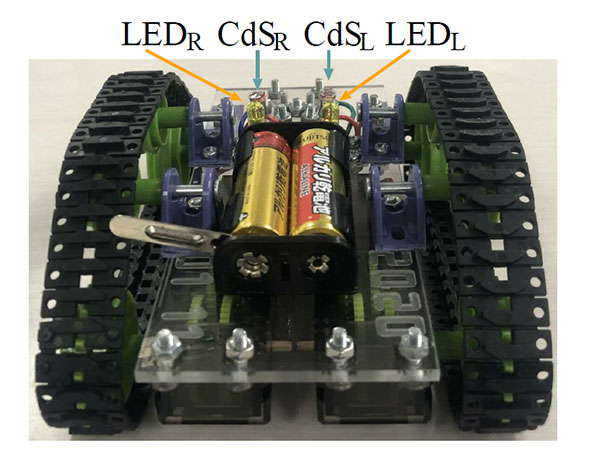 Fig. 2 実際のCdSとLED の配置(裏側)
Fig. 2 実際のCdSとLED の配置(裏側)発光素子であるLED(Light Emitting Diode)すなわち発光ダイオードと光センサーであるCdS(硫化カドミウム)を中心に光移動ロボットのライントレース動作を説明する。LEDは、ダイオードなので2本の足にアノード(電流の入る極)とカソード(電流の出る極)の区別があり、アノードからカソードに流れる電流に比例して明るく発光し、逆には電流は流れず発光しない半導体素子である。CdSは光が当たれば当たるほど電気抵抗が下がる素子である。実際に光移動ロボットに取り付けられている左右のCdSとLEDの写真をFig.2に載せる。裏側からみているので、本体左側にあるCdSLとLEDLが右側に、右側にあるCdSR,LEDRが左側になる。Fig.2では、分かりづらいが、それぞれのLED,CdSは、真下を向いて設置してあり、LEDLから出る光は床面に反射して、CdSLにあたるようにしてある。後に説明するアナログ電子回路は、CdSLの電気抵抗が下がると左側のクローラの回転速度が上がるように組まれていて、CdSRと右クローラの関係も同様である。Fig.3に、紙面上向きに移動する光移動ロボットを真上からみて機体を半透明として左右のCdSL,CdSRとLEDL,LEDRの位置と黒いラインがわかりやすい図を載せる。Fig.3(a)のように、左右とも半分づつ黒いラインに重なる位置にくると、左右それぞれのLEDL,LEDRから出た光は白い部分で反射して黒い部分で反射せずそれぞれCdSL,CdSRにほぼ同量あたる。そのため、左右ほぼ同速度でクローラが回転し直進する。Fig.3(b)のように、機体が右にずれると黒い部分にある左側のCdSLには、白い部分にある右側のCdSRに比べて光が当たらずクローラの回転速度も、左側の方が右側に比べて遅くなり、機体は徐々に左側にずれてFig.3(a)の状態に戻る。機体が左にずれるときも同様にFig.3(a)の状態に戻る。これにより、黒いラインをトレースできる。
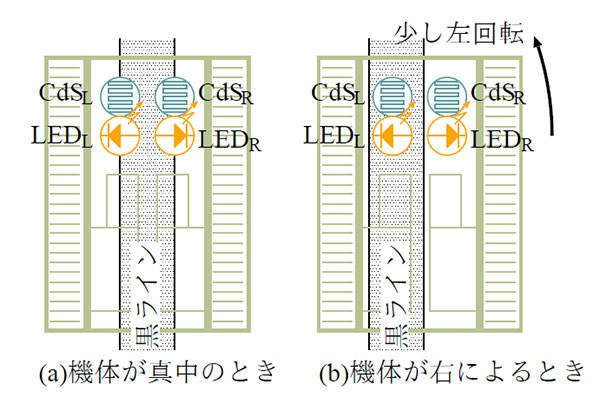 Fig. 3 光移動ロボットの動作説明
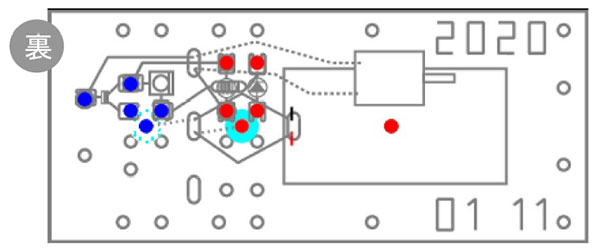
Fig. 3 光移動ロボットの動作説明ここでアナログ電子回路(Fig.4)の説明をする。回路は、電源としての電池をはさんで、それぞれの左右のモータに独立にある。それぞれのLEDL,LEDRは、それぞれアノード(略:A)からカソード(略:K)に電流を流して発光している。向きを間違えると電流は流れず発光もしない。それぞれ抵抗RL,RRを直列につないで電流を調節し、電源電圧の変化がなければ一定輝度でに発光する。回路中のFETL,FETRは、Field Effect Transisterというトランジスタの一種でS端子に対するG端子の電圧が高くなるほど、D端子からS端子への電流を多く流す。ゆえに、CdSLに光が当たりその電気抵抗が下がると、CdSLと半固定抵抗VRLとの間につながるG端子の電圧が上がり、D→S電流が増えモータMLがより速く回る。つまり、CdSLに光が当たるほど、モータMLが速く回る回路になっている。CdSRに対するモータMRも同様である。Fig.5に、実際の電子部品の形により近い模式図を左側だけ載せる。後に圧着端子をつけるときに、FETLトランジスタは、図中の3本の足のうち、真中を放熱板のある図面奥方向へ、外側2本は放熱板のない図面手前側に折る。FETRトランジスタは逆になる。VRL半固定抵抗は、足は3本あるが、切り欠きを手前にするときに、左の足は使わない。VRR半固定抵抗は、右の足は使わない。LEDの2本の足は、購入時は長さが異なり、長い方がアノードで短い方がカソードである。樹脂の中の切り欠きの形状でも、アノードとカソードの区別はつく。本光移動ロボットは、ひっくり返して、直接CdSL,CdSRに懐中電灯などで光を当てることで非接触操作もできる。
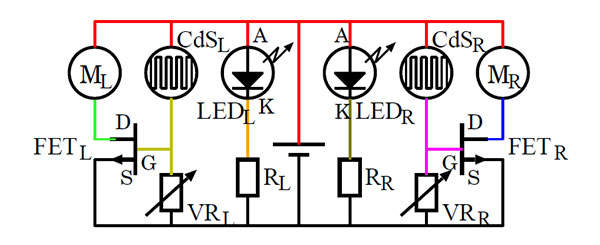 Fig.4 アナログ電子回路図
Fig.4 アナログ電子回路図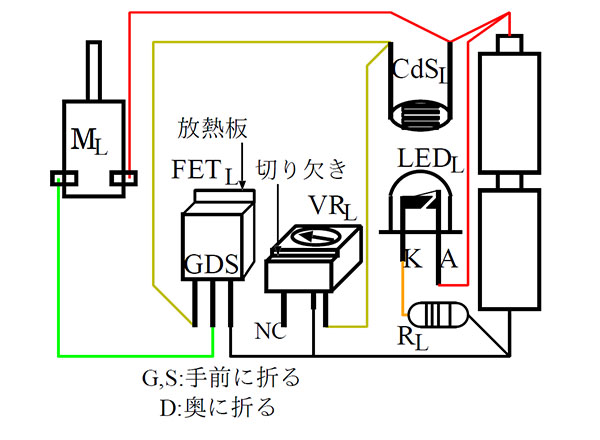 Fig.5 アナログ電子回路の模式図(左側のみ)
Fig.5 アナログ電子回路の模式図(左側のみ)3. 光移動ロボットの作り方
光移動ロボットは、穴あけ加工をした3mm厚の板に圧着端子を取り付けた電子部品と機械機構を組み上げてつくる。光移動ロボットの部品リストをTable1にあげる。
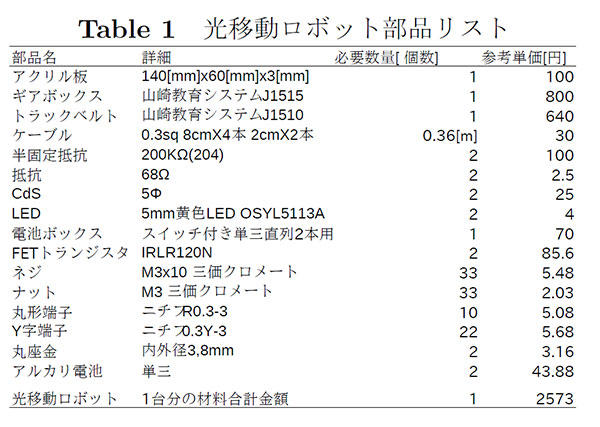
参考価格は、実際に2019年末に25台分を購入したときの価格から単価計算をしたものである。購入先は敢えて記述していないがwebなどで調べれば入手可能である。
3.1 組み立て準備
組み立て準備として、板への穴あけと電子部品への圧着端子の取り付けをする。
3.1.1 板加工
Fig.6に切削加工をしたアクリル板を載せる。これはRolandDGのmdx-20というNCをもちいて加工したものである。板は、ある程度丈夫で絶縁体であればよく、木材やケミカルウッドでもよい。この板は、長さ140[mm]x幅60[mm]x厚さ3[mm]で直径3mmのネジ用の穴33個とケーブルを通す楕円の穴4つをあけてある。また、Fig.6には、ナットや圧着端子を固定しやすくするために薄い堀加工もしてあるが、なくてもよい。穴の位置を正確に示す図面をFig.7に示す。直径3mmの円穴の位置は0.1mm程度の精度が必要であるが、楕円は圧着端子が通れば位置と大きさは適当でよい。
 Fig. 6 切削加工したアクリル板
Fig. 6 切削加工したアクリル板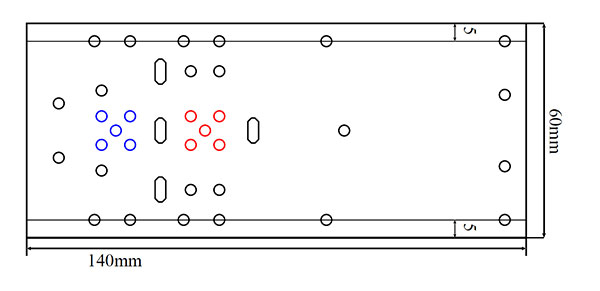 Fig. 7 穴あけ図面
Fig. 7 穴あけ図面Fig.7を140mmX60mmになるように印刷して板に貼り付けて穴あけ加工をすれば加工板はつくれると考えている。しかし、最初の表題下にあるE-Mailアドレスに連絡をもらえればデジタルデータを送るつもりである。
3.1.2 圧着端子取り付け
 Fig. 8 圧着端子を付けた実際の電子部品
Fig. 8 圧着端子を付けた実際の電子部品
Fig. 8 圧着端子を付けた実際の電子部品Fig.8に圧着端子を付けた電子部品の写真を載せる。また、各部品にどのように加工されているか分かりやすくするために、Fig.8の模式図をFig.9に載せる。電子部品にはY字型圧着端子を、ケーブルの先には丸型圧着端子を取り付ける。Fig.9中、2つあるトランジスタは、それぞれ放熱板の向きを変えて圧着端子をつける。上側に写るものは左側、下側は右側に放熱板が来ている。半固定抵抗は、3本の足の内、切り欠きを目安に2つの圧着端子をつける。それぞれ2つあるCdSとLEDは、それぞれ同じにすればよいが、足の長さを調節して電子部品の大きさも含めて2cm±1mm程度にしなければならない。抵抗は、図中右側にくる方の圧着端子をそれぞれ逆方向に90度ずらして取り付ける。スイッチ付き電池ボックスのケーブルと2本のケーブルとモータのケーブルの長さは、それぞれFig.8中の長さを参考にすればよい。
これにより電子部品はネジ止めでそれぞれの足を固定することができる。また、足を重ねて止めることにより、通電して電子回路を構成することもできる。これにより、ハンダゴテを使うことなしに電子回路を組むことができる。
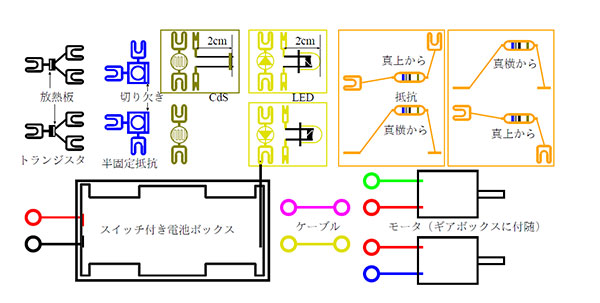 Fig. 9 圧着端子を付けた電子部品の模式図
Fig. 9 圧着端子を付けた電子部品の模式図3.2 組み立て
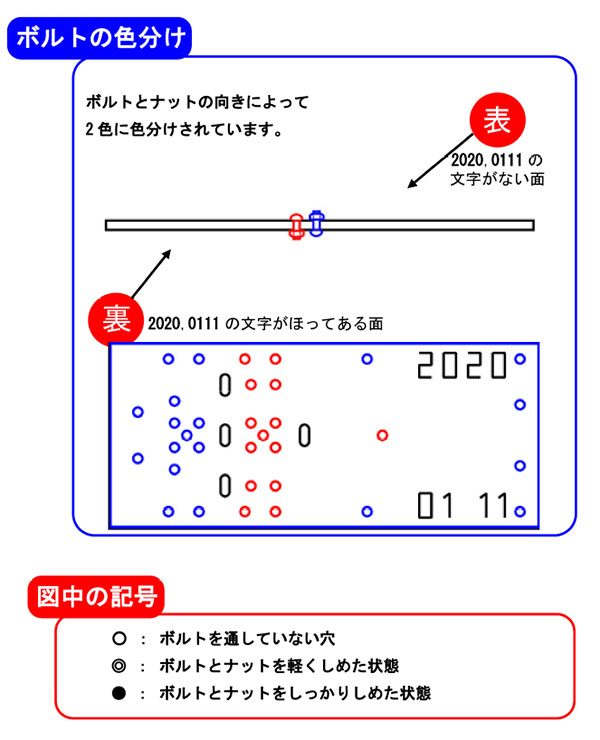
加工済み板に圧着端子付き電子部品を次ページ以降に掲載の設計図にもとづき取り付ける。ギアボックスの組み上げは自在ギアボックスに付属の設計図も用いる。ただし、以下の設計図は2020年1月11日に小中学生対象のイベントで用いたものであり、表裏を区別するのに加工済み板に掘り込んである2020.0111の文字列を用いている。この文字列はなくても、33個の丸穴と4個の楕円穴をあけただけならば、表裏同形なので、片面を表、他方を裏と決めれ組み立てをすれば問題はない。
おわりに
ここでは、私が設計した光移動ロボットを紹介した。このロボットは、小学生高学年以上を対象として、電子部品と機械機構を自分で組み上げてライントレーサーのような少し賢いものがつくれることを体感してもらうためのもので、正確にライントレースすることが目的ではない。制御システムがアナログのため、電源の消耗やギアボックスの摩擦変化などにより、ライントレースの正確さが変化することがある。本掲載を通して不明で問い合わせしたい点があれば,筆者にE-Mailで連絡を下さい。答えられる範囲で答えます。

注意!はじめに読んでください
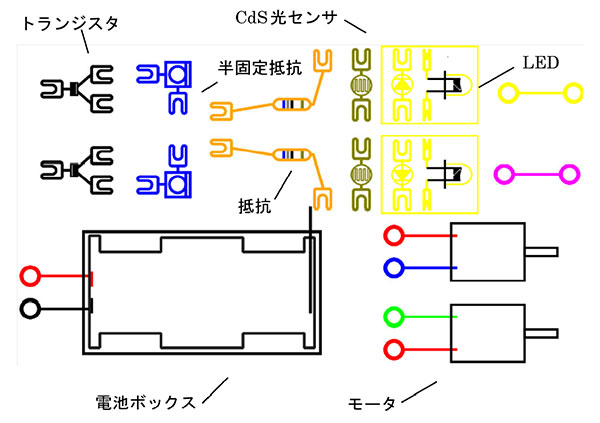
部品の名前とかたち

-
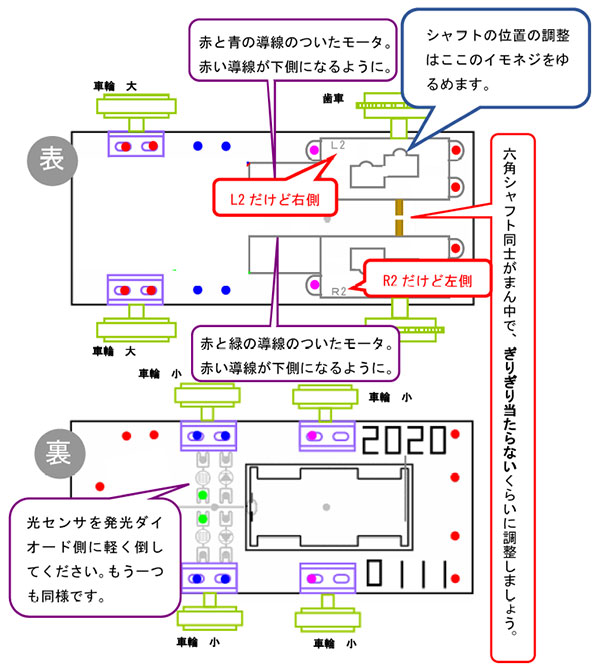
電池ボックスの取り付け
電池ボックスは裏(2020.0111の数字がほってある面)に取り付けます。
最初に赤と黒の導線を2回縦長の穴に通してください。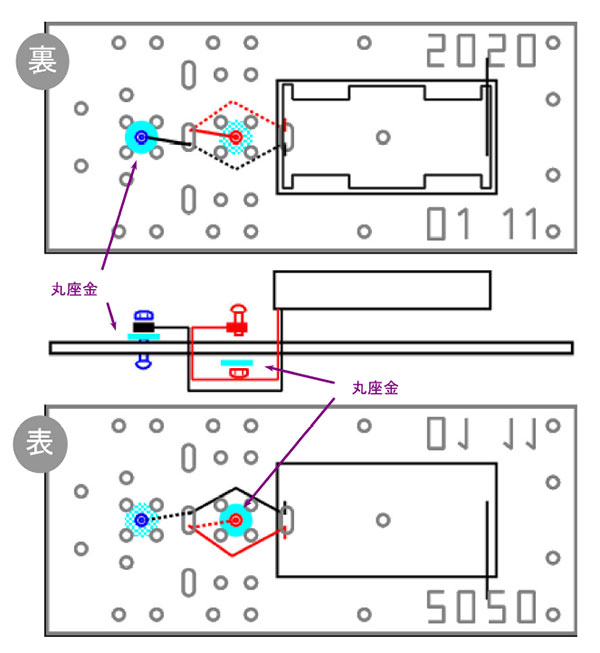
-
抵抗・半固定抵抗の取り付け
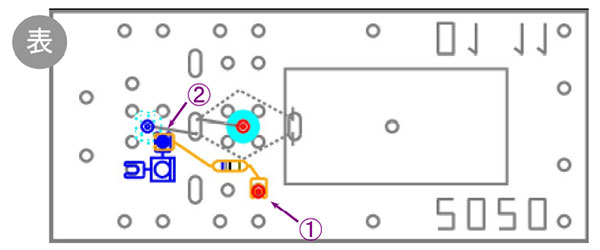
①半固定抵抗の足の上に抵抗の足をのせてネジをしっかりしめる。
②抵抗の足を緩くしめる。(右側も同様) -
LEDとCdS(光センサ)の取付
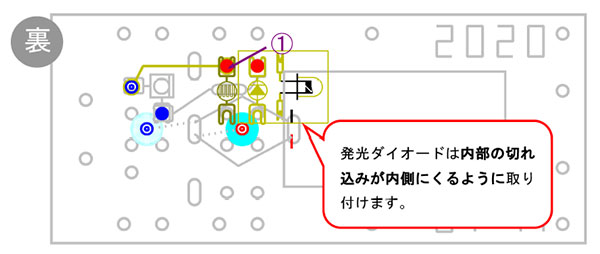
①CdSの足の上に黄色の丸ケーブルをとめる。(右側は黄色ケーブルを紫ケーブルに変えて同様)
-
トランジスタの取り付け
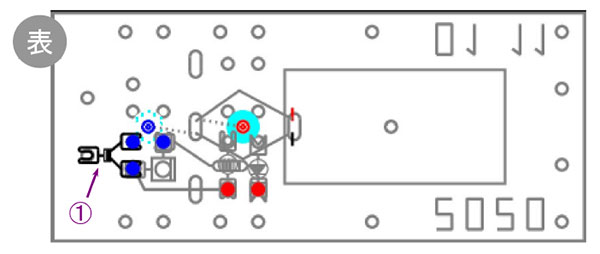
①トランジスタは金属の放熱板側に足が曲げられているものを取り付ける。
-
モータの取付
-
ナットのしめつけ
ナットを左右で10個しめつける。
-
電池ボックスの固定
-
ギアボックスの組み立て
回路の製作はここでいったん終わりです。
ギアボックスを組み立てましょう。
組み立ては、自在ギアボックスの中に入っている組立説明書にしたがい、低速(200.083:1)のものを組み立てます。ギアボックスを組み立てるときの注意部品はページの写真で確認しましょう。
B3~B7の部品は使う直前まで取り出さないようにしましょう。
ギア比は一番大きい(200.083:1)の組光移動ロボットにはL側のギアボックスを右側に、R側のギアボックスを左側にとりつけます
-
車輪の組み立て
車輪は図のように組み立てます。
大きい車輪を2つ、小さい車輪を4つ組み立ててください。 -
ギアボックス、車輪の取り付け
-
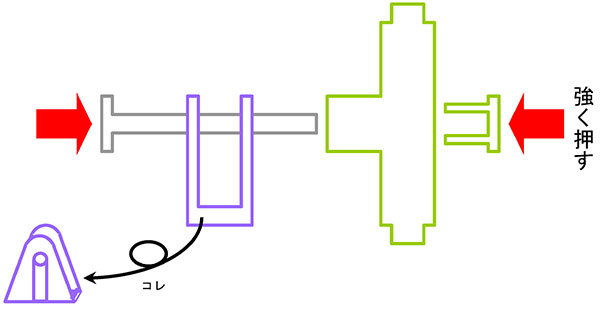
ベルトの取り付け
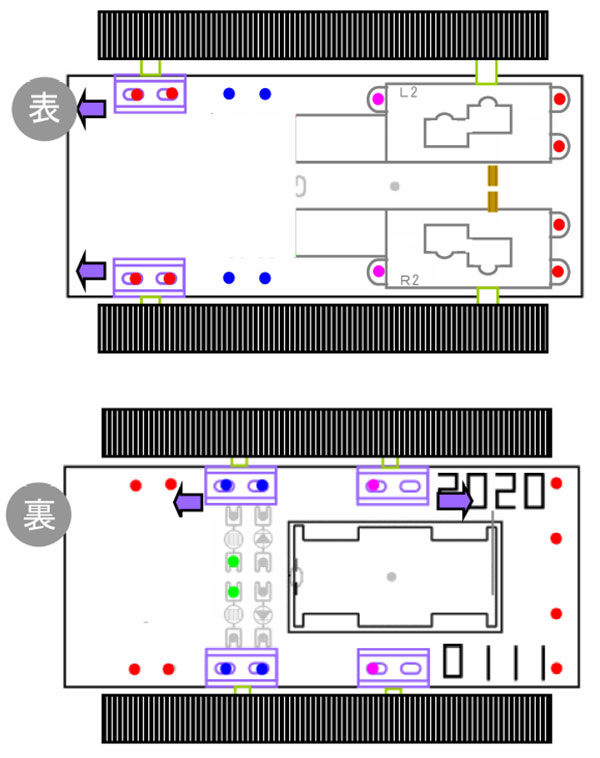
4本あるベルトのうち1本は使いません。
1本を半分の長さで切り、それぞれ1.5本分の長さにして左右にはめます。
ベルトを取り付けたら、紫色の部品を図の矢印の向きに動かしてベルトを軽く張りましょう。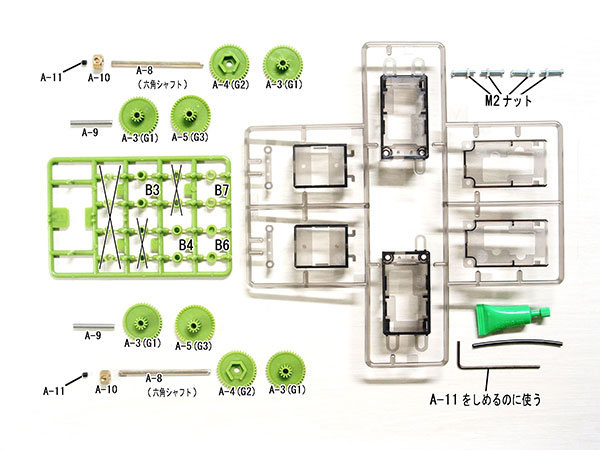
遊び方
線追跡や操縦がうまくいかないときは、半固定抵抗の中心の白い部品をプラスドライバーで調節してください。
調節の目安は、持ち上げたときは静止して、白い紙の上に置いたときに動く程度です。
| 掲載大学 学部 |
三重大学 工学部 | 三重大学 工学部のページへ>> |
関連記事





三重大学
工学部
- 総合工学科 総合工学コース
- 総合工学科 機械工学コース
- 総合工学科 電気電子工学コース
- 総合工学科 応用化学コース
- 総合工学科 建築学コース
- 総合工学科 情報工学コース